


 Menu
Menu

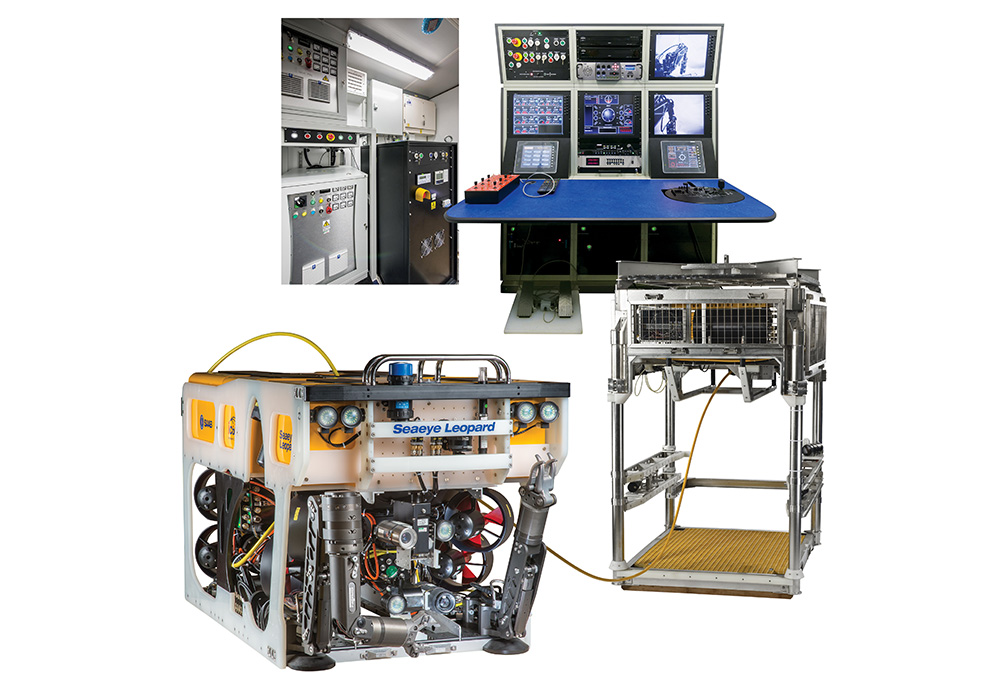
The Leopard is an exceptionally powerful electric work class vehicle with a minimal 20ft x 8ft LARS footprint. It is fitted with 11 thrusters to provide a forward thrust of over 500kgf, has a payload of 240kg (2000m) or 215kg (3000m), and is controlled by Saab Seaeye's iCON™ intelligent control system.
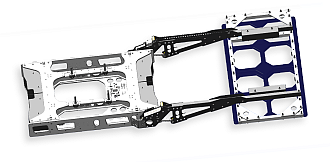
A large open payload within the chassis allows flexible reconfiguration of the vehicle by installing combinations of specially designed tooling, survey and navigation sleds. A 1000kg through-frame lift and a wide range of tooling skids make the Leopard a versatile system capable of performing a range of work tasks in even the harshest of environments at depths of up to 3000m.
.jpg)
Advanced vehicle autopilots for heading, depth, altitude, pitch and roll, and Station Keeping compliment Saab Seaeye's iCON™ intelligent control system that allows the system to control, self-diagnose and log data from system devices.
.jpg)
An electric vehicle with eleven powerful thrusters, a large payload and the advanced control features of iCON™ give the Leopard a competitive edge over larger hydraulic vehicles.

Designed for work at depths of 2000m or 3000m and fitted with a wide range of survey sensors and heavy duty tooling options.
The Leopard ROV is powered by a floor-standing high voltage, high frequency power supply unit. Additional power supplies are available for tooling and TMS options.
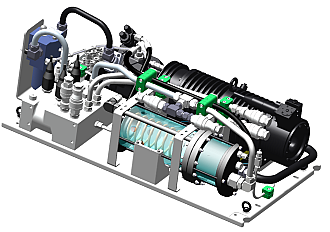
The ROV can be fitted with Schilling Orion 7P + 4R Manipulators together with a compact Integrated Hydraulic Power Unit (IHPU) based circuit including a valve pack with seven bi-directional rate valves. Additionally, for typical intervention and work class tasks such as cutting, grinding, water jetting and dredging an auxiliary 3000VAC high power hydraulic work pack can be fitted.
Surface control hardware includes touch screens running the graphical user interface (GUI) for vehicle power and control; system diagnostics including remote access for technical support; flight screen monitors that display data and video transmitted via Fibre Optic multiplexers and a CWDM, and a hand control unit for the ROV.
Additional surface equipment options include TMS foot pedals for the optional TMS, tooling hand control units, video equipment and recording/eventing systems.
Available as a free swimming ROV or in conjunction with a Type 8 Tether Management System (TMS) or a Top Hat TMS.
ROV rated up to 3000m fitted with eight horizontal and three vertical SM9 thrusters supplied with 500 Volts DC, an electronics pod with fibre optic multiplexers and a CWDM, up to ten LED lights on four channels, cameras, a depth sensor, and a compass pod with integrated Magneto-resistive compass, accelerometers and gyros with pitch and roll outputs for vehicle auto heading, depth, pitch and roll. Auto altitude is available as an option when an altimeter is fitted. Station Keeping with nudge controls is available as an option when a compatible DVL and/or INS is fitted.
Standard vehicle interfaces include connections for up to six composite cameras, fifteen auxiliaries including six Gb Ethernet channels on a dedicated 2.5G link, high power 24VDC and 48VDC interfaces supporting the latest advanced survey and imaging equipment, a copper signal core for CP reference, and trigger interfaces supporting Responder Transponders, PPS and timing of Acoustic devices. A spare fibre and CWDM fibre wavelengths provide options for survey multiplexer bottles and HD/UHD/4K video cameras.
110VAC equipment is supported through an optional subsea 350W output pure sine wave Inverter pod powered from a dedicated 24VDC interface on the ROV Epod, or a 2kW output Transformer pod powered from a surface 3kV 50/60Hz Tooling Supply.
The surface video architecture is based on modern digital HD/UHD broadcast standards and includes a 20x20 SD/HD/UHD video switcher and 8x8 HDMI switcher (with control through the iCON touchscreen GUI) and a single channel HD Pilot Video Overlay.
Video options include up to six Subsea Composite Video interfaces, two HD-SDI Video over Coax interfaces, surface decoders for IP Video cameras, HD/4K monitors and display splitters, and SD/HD/4K digital video recorders and overlays.
An optional Onshore Piloting remote operator station enables robust over-the-horizon control and piloting of the ROV and TMS.
Specification | Leopard |
Depth Rating (msw) | 2000 (3000) |
Dimensions |
|
Length (mm) | 2150 |
Height (mm) | 1254 |
Width (mm) | 1160 |
Weight in air (kg) | 1200 |
Payload (kg) | 240 (215) |
Thrust |
|
Forward (kgf) | 500 |
Lateral (kgf) | 230 |
Vertical (kgf) | 200 |
Speed (knots) | >4 |
Power |
|
Power input phases | 3 |
Voltage (VAC) | 380/480 |
Option | 690 |
Frequency (Hz) | 50-60 |
Battery Capacity (kWh) | N/A |
Endurance (km@2kts) | N/A |

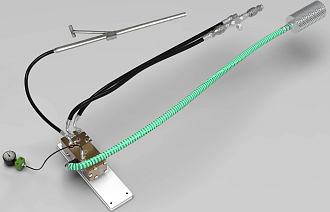
Ultrasonic thickness gauge to determine the level of corrosion present in a structure.

Three-phase 3000VAC 5kVA and 30kVA power supply units for TMS equipped systems and Tooling.
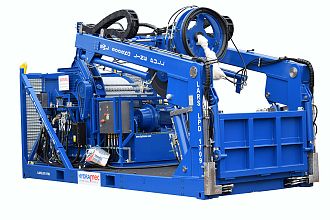
Auxiliary 15kW 3kV 3ph 60Hz Hydraulic HPU Sled: 210 Bar @ 45 L/min for tooling, cleaning, jetting and dredging.
Water Jetting and cavitation blasting for cleaning operations (requires 3ph hydraulic tooling supply).

FlexiClean Cleaning Tool for cleaning of underwater structures (requires 3ph hydraulic tooling supply).

Fibre Optic Survey Multiplexer Systems.

230mm Rotary Grinder for cutting, grinding and cleaning (requires 3ph hydraulic tooling supply).
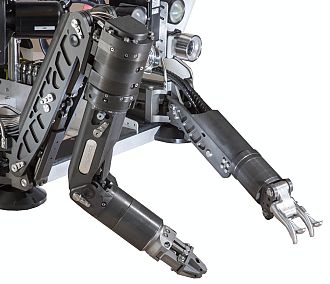
Schilling Orion 7P and 4R manipulator arm options with hydraulic system including DC iHPU, valve pack, and pressure compensator.

Cathode Potential Probes (contact or proximity options), Ultrasonic Thickness and Flooded Member Detection systems.
Pipeline and cable survey skids for TSS 440 detection systems and camera boom arms - various camera and LED light options.
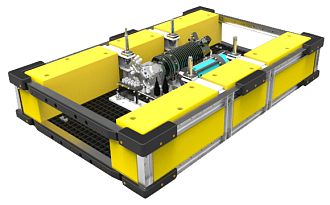
General purpose and tooling basket skids for deploying tools and equipment.

Scanning Sonar and surface equipment options.

DVL and inertial navigation systems including fibre optic gyros, sound velocity profilers and depth sensors.

Battery-operated, Xenon emergency strobe used to locate vehicle.

Multibeam Imaging Sonar and surface equipment options.

Altimeter for measuring the height of the vehicle above the sea floor. Auto Altitude option available.

Complete acoustic tracking system used to calculate the position of the ROV with a fitted acoustic beacon.

Dual Multibeam Echosounder (MBES) fitted to a forward frame.

38mm Anvil Cutter for cutting wire rope and similar cables (requires hydraulic supply).

High resolution SD composite cameras, colour or monochrome / low light, fixed and zoom / focus.

HD IP Cameras and decoders.

HD and UHD/4K fibre cameras and IP Cameras.

Laser options for video survey.

SLAM, LIDAR and Photo-Mosaic Survey Systems, with surface 3D visualisation and post-processing options.

Top Hat Tether Management System with 350m capacity of 20mm tether, fitted with latch status and line out sensors. Options include depth and current sensors, and additional downward looking light and camera.

Safe Area 20ft split Control Cabin with a Pilot Control section and a separate high voltage PSU section. Fitted with electric power distribution panels, lighting, air conditioning, heating,19 inch racks and escape hatch is available as is a Zone II upgrade.

Tether Management System (TMS) Type 8 allowing for the deployment of the ROV at working depth and also providing protection. Optional TMS Camera and LED Light.
A-Frame Safe Area Launch and Recovery System (LARS) with 1100, 2200, or 3300m winch capacities. A Zone II upgrade option is available. Optional folding platform for additional work space.
LOTOS Petrobaltic, part of multi-energy concern ORLEN, has ordered Saab’s Seaeye Leopard work class robotic vehicle to service underwater infrastructure within Poland’s B3 and B8 oil fields in the Baltic Sea.
Read more
A £multi-million complete Saab Seaeye Leopard system has been supplied to the Spanish Navy for submarine escape and rescue, and underwater intervention.
Read more
Ocean Infinity have selected the Saab Seaeye Leopard to complement its pioneering 'Armada' fleet of unmanned surface robot vessels.
Read more


 Twitter
Twitter Linkedin
Linkedin